Technologie
Technologie, die unter
echten Bedingungen fliegt.
Nicht im Labor entwickelt. In der Realität bewiesen — bei Sturm, Eis, Extremtemperaturen.
Drohnen-Technologie
16 Jahre. 100+ Iterationen. Jede Generation besser als die letzte.
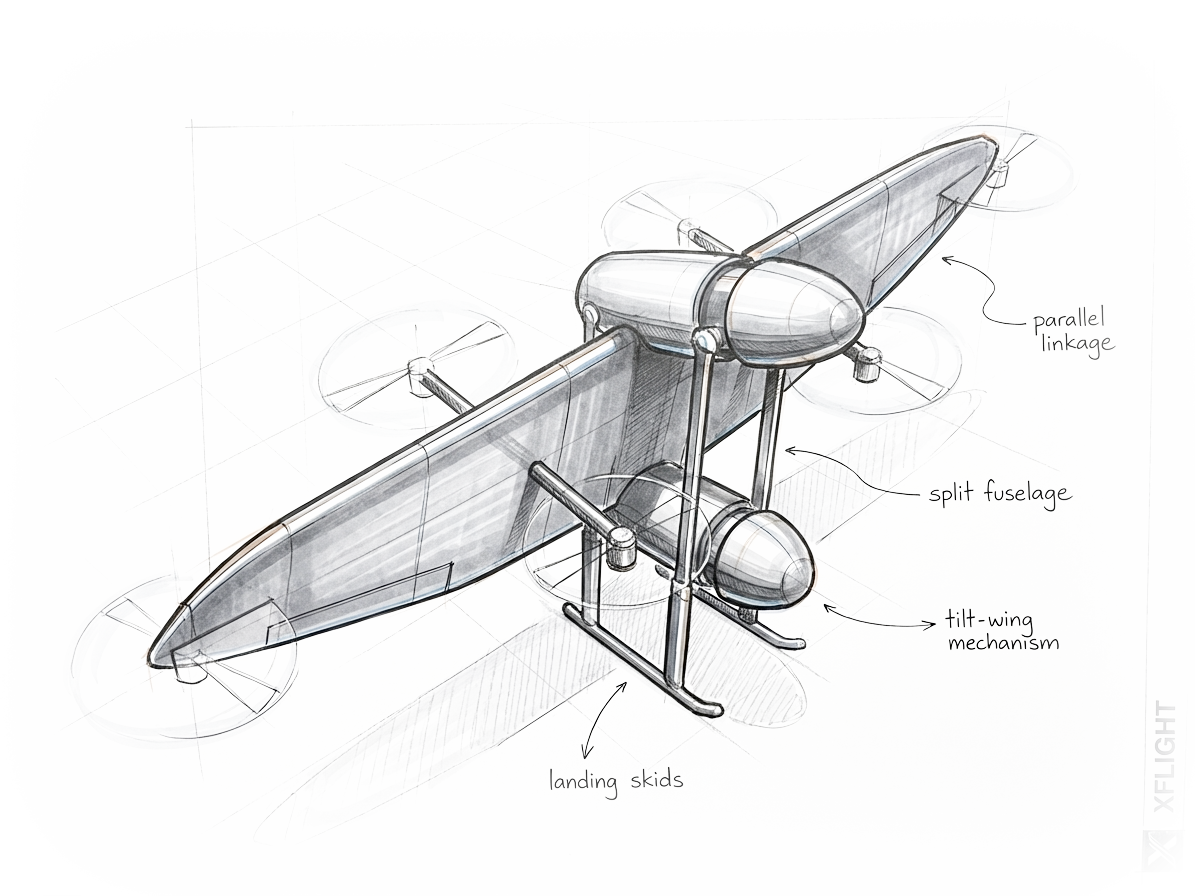
Erstes flugfähiges
eVTOL-Konzept.
Designed by Serdar Soyal — der erste Beweis, dass XFLIGHTs Vision vom Lufttaxi abheben kann. Von Grund auf entwickelt, legte dieses Modell die aerodynamischen Grundlagen und die Antriebsgeometrie, auf der jede folgende Generation aufbaut.
Patentierte Technologie
Das Konzept, das zum
Patent wurde.
Was M1 im Flug bewies, sicherte XFLIGHT rechtlich ab. Erfinder Martin Rudats Patent schützt eine mechanisch elegante Antwort auf das VTOL-Problem, die kein Wettbewerber repliziert hat: über mehrere Gelenke verteilte Schwenkachse, vier oder mehr synchronisierte Motoren, kein Totgewicht. Geschützt bis 2039.
Kerninnovation 1
Zweigeteilter Rumpf
Erster und zweiter Rumpfabschnitt gegeneinander verlagerbar — modular, adaptierbar, mechanisch unabhängig vom Antriebssystem.
Kerninnovation 2
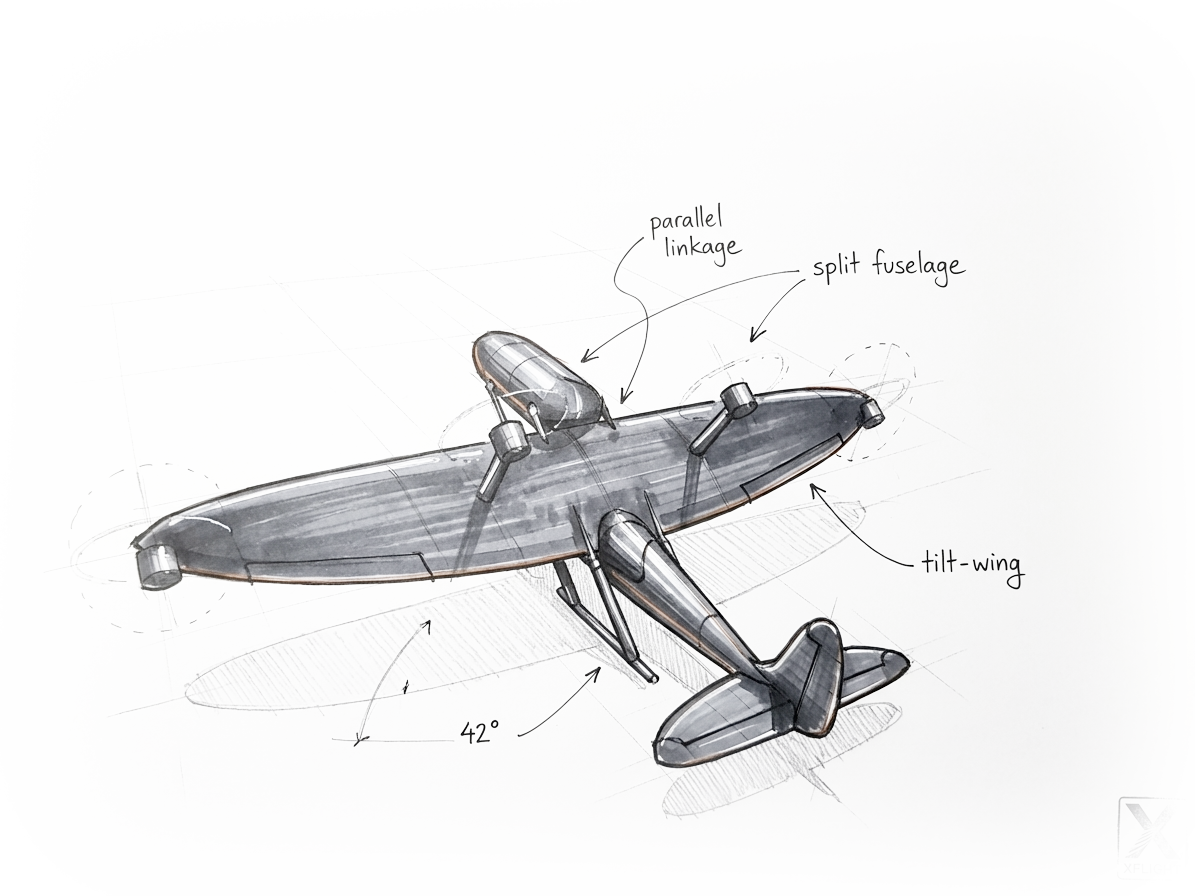
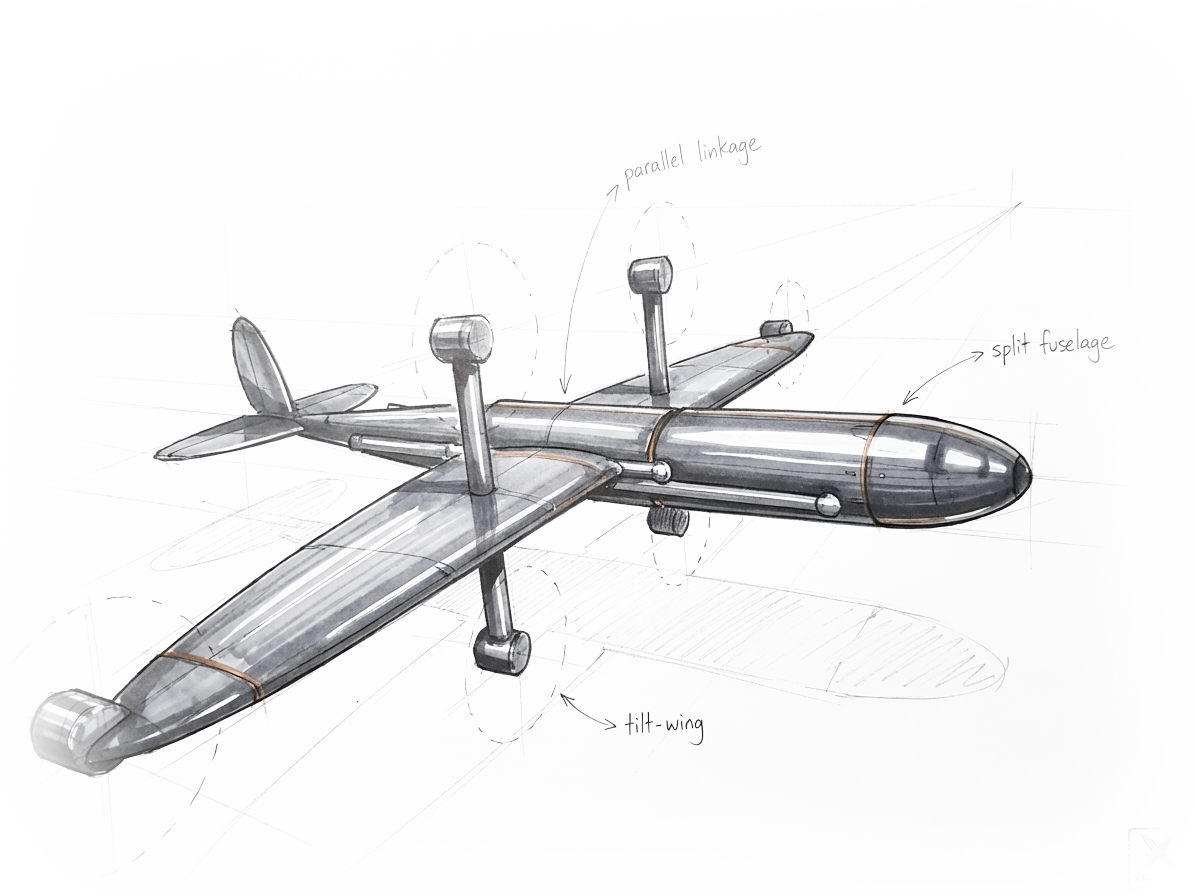
Starrer Schwenkrahmen
Eine gemeinsame Schwenkachse für alle Antriebseinheiten — eliminiert individuelle Tilt-Mechanismen und das Gewicht und die Ausfallmodi, die sie mitbringen.
Kerninnovation 3
Vektorierter Schub
Alle Motoren schwenken synchron zwischen horizontal und vertikal. 100 % Motorauslastung in jeder Flugphase — Hover, Transition, Reiseflug.
Strukturelle Perfektion.
Patentierte Tilt-Mechanik.
Eine Serie immer weiter verfeinerter Prototypen für Struktur- und Mechanikoptimierungen — mit dem Ergebnis der patentierten Tilt-Mechanik, die XFLIGHTs Antriebsarchitektur bis heute definiert. Jede Iteration unter realen Flugbedingungen erprobt.
Wettbewerbsanalyse
Technisch überlegen
wo es zählt.
Jeder VTOL-Ansatz bringt grundlegende Kompromisse mit sich. XFLIGHTs patentierte Architektur führt dort, wo es entscheidend ist — Effizienz, Schutz und Skalierbarkeit auf allen Plattformen.
| Kriterium | XFLIGHT | Lift+Cruise | Tiltwing | Multirotor |
|---|---|---|---|---|
| Reiseflug-Effizienz | 9 / 10★ | 9 / 10 | 9 / 10 | 2 / 10 |
| Hover-Effizienz | 7 / 10 | 7 / 10 | 6 / 10 | 8 / 10 |
| Mechanische Einfachheit | 6 / 10 | 5 / 10 | 4 / 10 | 9 / 10 |
| Patentschutz | 9 / 10★ | 3 / 10 | 5 / 10 | 1 / 10 |
| Skalierbarkeit | 8 / 10★ | 8 / 10 | 7 / 10 | 4 / 10 |
Quelle: XFLIGHT Patentanalyse · 22. Februar 2026
XFLIGHT Flight Control.
Im Feld bewiesen.
Die Hardware, die die Software validiert hat. M3.2 war die Testplattform für XFLIGHTs MIXER-Algorithmen — optimierte Differential-Thrust-Steuerung und präzise Ruder-Stabilisierung, erprobt unter realen Einsatzbedingungen in Hunderten von Flugstunden.
KI-Integration: Maggie
Zentral-dezentrale Architektur — strategisch oben, autonom unten.
Strategische Ebene
Maggie V3
Strategische Entscheidungen · Mission-Koordination · Schwarm-Intelligenz
Lokale Ebene (Onboard)
Onboard-KI · Nvidia Jetson
Hinderniserkennung · Stabilisierung · Echtzeit-Reaktion
Lernpfad zur Schwarm-Autonomie
Phase 1
Eine Drohne
JETZTPhase 2
Mehrere Drohnen
NÄCHSTER SCHRITTPhase 3
Schwarm — 10+ Drohnen
ZIELSicherheitskonzepte
15 Jahre
kein einziger Unfall.
Redundante Systeme auf allen Ebenen
Maggie als Sicherheits-KI — sie stoppt, bevor der Mensch reagiert
Antizipation statt Reaktion
Transparente Entscheidungskette
Tech Stack
High-level — keine Code-Details.