Technology
Technology that flies under
real-world conditions.
Not developed in a lab. Proven in reality — in storms, ice, extreme temperatures.
Drone Technology
16 years. 100+ iterations. Every generation better than the last.
First Flight-Capable
eVTOL Concept.
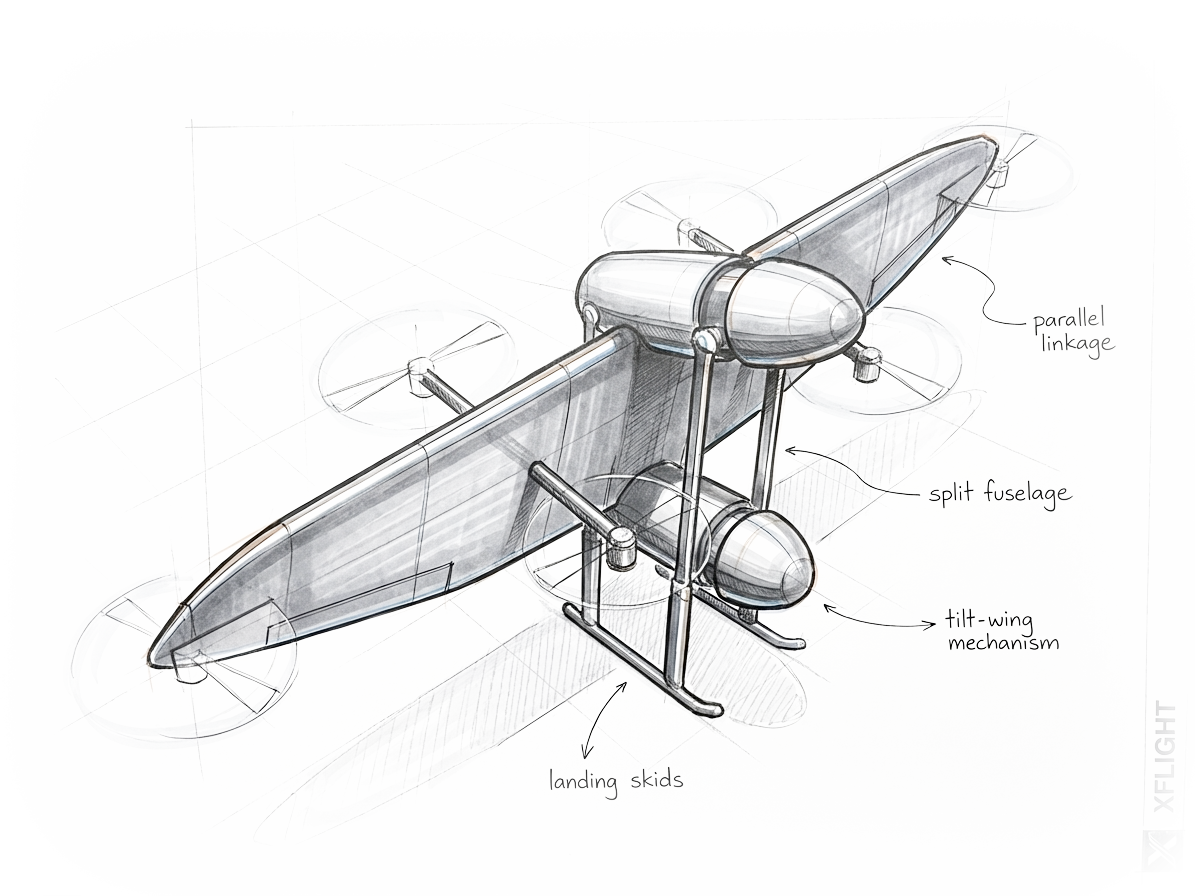
Designed by Serdar Soyal — the first proof that XFLIGHT's air taxi vision could leave the ground. Built entirely from scratch, this model validated the aerodynamic principles and propulsion geometry that every subsequent generation has been built on.
Patented Technology
The Concept That
Became a Patent.
What M1 proved in flight, XFLIGHT secured in law. Inventor Martin Rudat's patent protects a mechanically elegant answer to the VTOL problem no competitor has replicated: a pivot axis distributed across multiple joints, four or more synchronised motors, zero dead weight. Protected until 2039.
Core Innovation 1
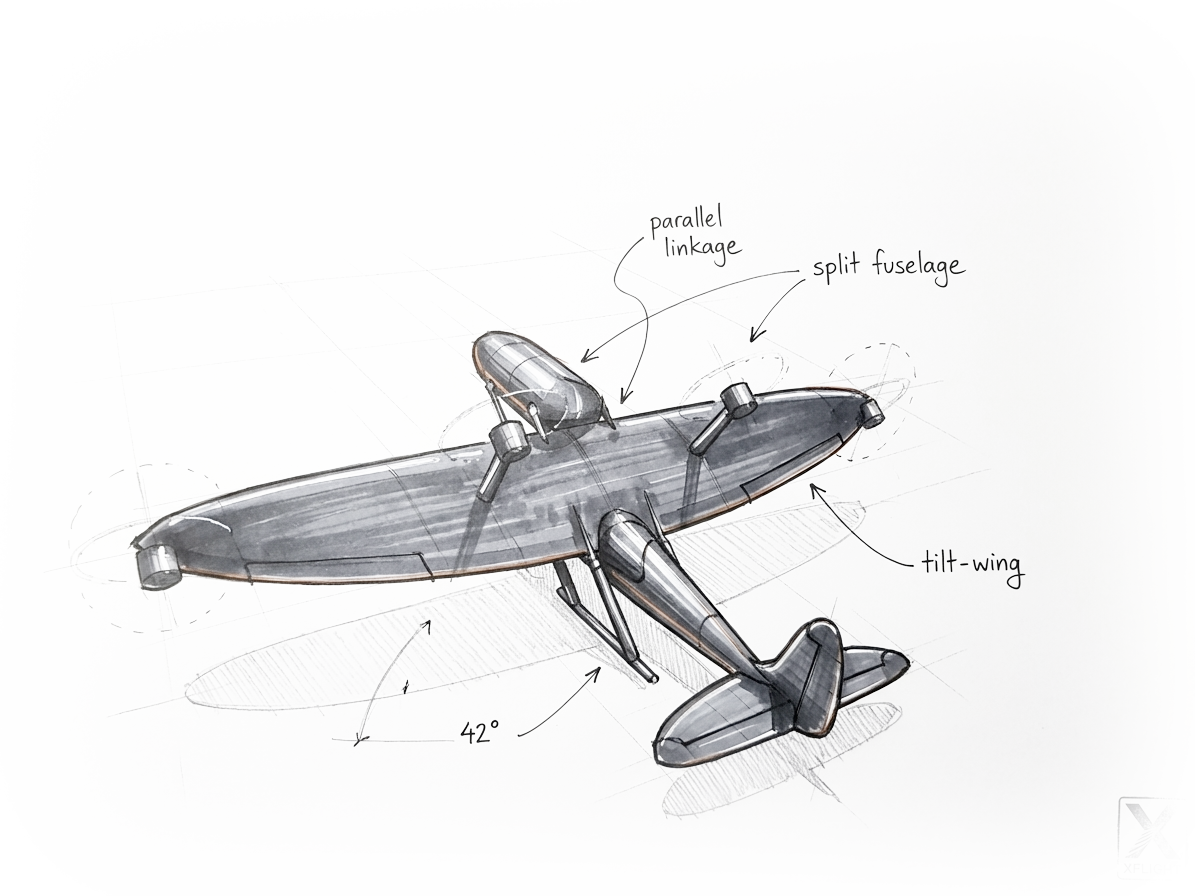
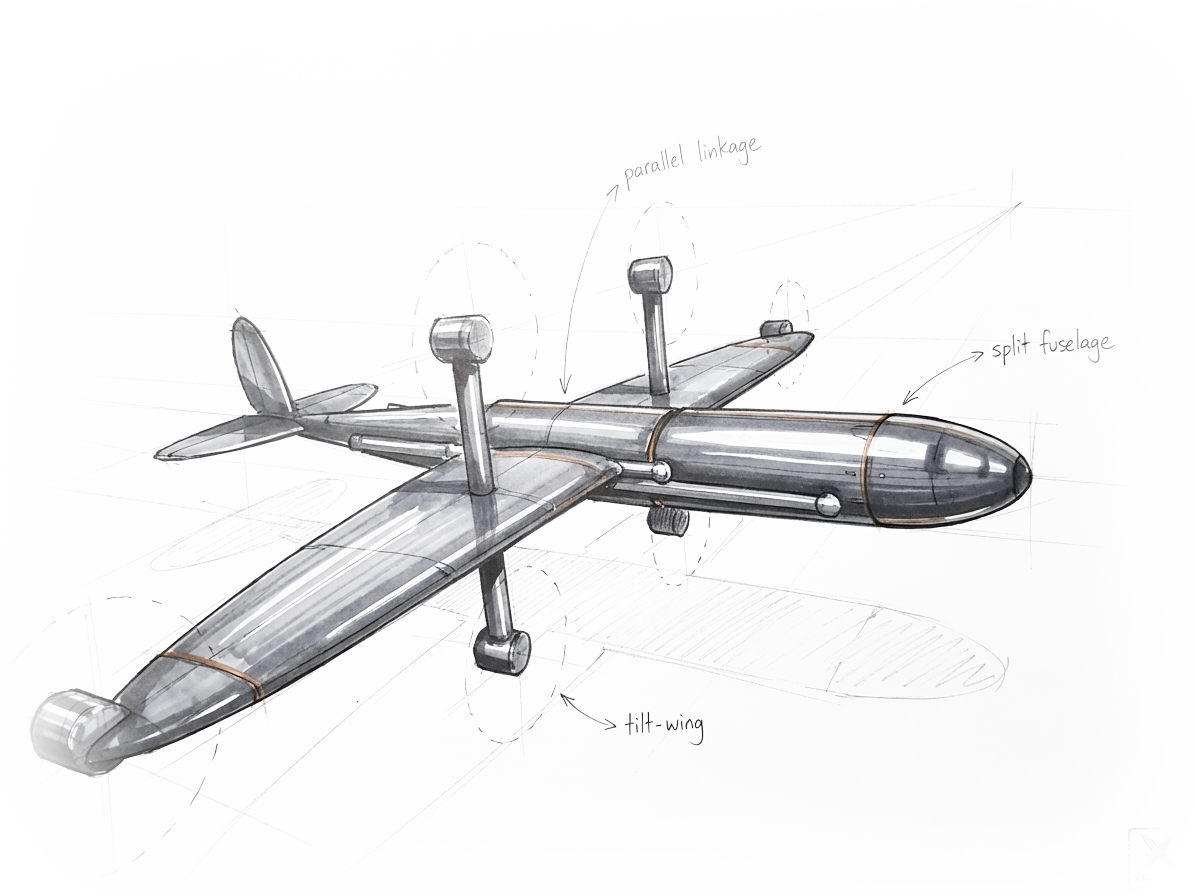
Split Fuselage
Two fuselage sections displaceable relative to each other — modular, adaptable, and mechanically independent from the propulsion system.
Core Innovation 2
Rigid Tilt Frame
One shared pivot axis for all drive units — eliminating individual tilt mechanisms and the weight and failure modes they introduce.
Core Innovation 3
Vectored Thrust
All motors pivot synchronously between horizontal and vertical. 100% motor utilisation in every flight phase — hover, transition, cruise.
Structural Mastery.
Patented Tilt Mechanism.
A series of progressively refined prototypes targeting structural integrity and mechanical precision — culminating in the patented Tilt Mechanism that defines XFLIGHT's propulsion architecture. Each iteration stress-tested under real flight conditions.
Competitive Analysis
Technically Superior
Where It Matters.
Every major VTOL approach involves fundamental trade-offs. XFLIGHT's patented architecture leads where it counts — efficiency, protection, and scalability across all platforms.
| Criterion | XFLIGHT | Lift+Cruise | Tiltwing | Multirotor |
|---|---|---|---|---|
| Cruise Efficiency | 9 / 10★ | 9 / 10 | 9 / 10 | 2 / 10 |
| Hover Efficiency | 7 / 10 | 7 / 10 | 6 / 10 | 8 / 10 |
| Mechanical Simplicity | 6 / 10 | 5 / 10 | 4 / 10 | 9 / 10 |
| Patent Protection | 9 / 10★ | 3 / 10 | 5 / 10 | 1 / 10 |
| Scalability | 8 / 10★ | 8 / 10 | 7 / 10 | 4 / 10 |
Source: XFLIGHT Patent Analysis · 22 February 2026
XFLIGHT Flight Control.
Field-Proven.
The hardware that validated the software. M3.2 served as the test platform for XFLIGHT's MIXER algorithms — optimised Differential Thrust control and precision rudder stabilisation, proven under real-world operational conditions across hundreds of flight hours.
AI Integration: Maggie
Central-decentralized architecture — strategic at the top, autonomous at the bottom.
Strategic Level
Maggie V3
Strategic decisions · Mission coordination · Swarm intelligence
Local Level (Onboard)
Onboard AI · Nvidia Jetson
Obstacle detection · Stabilization · Real-time response
Learning Path to Swarm Autonomy
Phase 1
One drone
NOWPhase 2
Multiple drones
NEXT STEPPhase 3
Swarm — 10+ drones
GOALSafety Concepts
15 years
zero accidents.
Redundant systems at all levels
Maggie as safety AI — she stops before the human reacts
Anticipation instead of reaction
Transparent decision chain
Tech Stack
High-level — no code details.